ヒートマップのサンプルプログラムをScottPlotで作成しました。以下を参考にしています。資料1*1、資料2*2、資料3*3
サンプルプログラム1
ヒートマップとは数値データを色に対応させて表示し、温度分布をわかりやすくした図です。ScottPlotでは配列(0,0)の数値データを左上の座標から色で表示します。
カラーマップで数値と色を対応させています。デフォルトはViridis です。
表示データの最大値、最小値がカラーマップの両端の色となります。
ヒートマップの横に表示するカラーマップをカラーバーと呼んでいます。


サンプルプログラム2
カラーマップの選択、スケール変更、補間処理の確認用プログラムです。
またカラーマップのRGB値を保存できます。
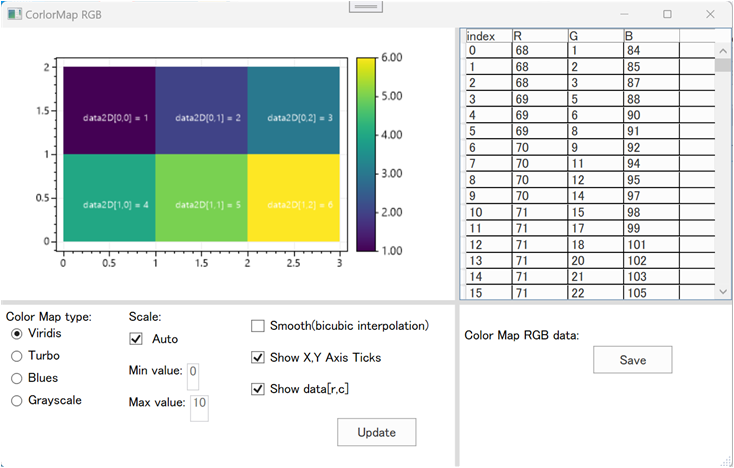
・Updateボタン : ヒートマップを更新します。
・Color Map type: カラーマップの選択します。

・Scale: Autoのチェック時には、表示データの最小値、最大値がカラーマップの両端の色となります。Autoが未チェック時には、入力した最小値、最大値がカラーマップの両端の色となります。

・Smooth : 補間処理を行い表示します。

・Show X,Y Axics Ticks : X,Y軸の目盛り表示の有無です。

・Show data[r,c] : 配列データの表示の有無です。

・SAVE ボタン: 表示に使用中のカラーマップのRGB値 を保存します。

環境
Windows 11 Pro , 22H2 .NET Framework 4.8
Microsoft Visual Studio Community 2022 (64 ビット) – Current Version 17.6.3
WPF アプリ(.NET Framework) ( C#,XAML,Windows,デスクトップ)
ScottPlot 4.1.67
ファイルの登録場所
サンプルプログラム1: https://github.com/vABCWork/WPF-HEATMAP-SAMPLE1
サンプルプログラム2: https://github.com/vABCWork/WPF-HEATMAP-SAMPLE2
*1:資料1「ヒートマップによる表示」 https://scottplot.net/cookbook/4.1/#heatmap
*2:資料2「カラーバー」 https://scottplot.net/cookbook/4.1/category/plottable-colorbar/
*3:資料3「カラーマップの種類」 https://scottplot.net/cookbook/4.1/colormaps/